고딩때는 피젯 스피너가 한참 유행했었다.
유행 당시에는 크게 관심을 갖지 않았는데, 아빠가 어떤 회사 행사의 기념품으로 3D printing된 스피너 두개를 갖고온다.
예비 고3 때 그걸 돌려본 것이 내 수험생활 최대의 공부 손실로 이어졌다.
하지만 얻은 것이 결국 더 많으니.. <A Fidgety Problem>은 우연히 돌려본 스피너에서 down the rabbit hole을 해버린 이야기이다.
팔이 3개인 피젯 스피너를 빠르게 돌리면..
처음에는 별다른 형상이 보이지 않다가, 팔 6개가 정지한 듯한 잔상이 보이는 시점이 온다.
조금 기다리면 기존의 잔상이 사라지고, 다시 팔 9개가 정지한 것처럼 보이는 시점이 온다.
이어서 12개.. 15개... 18개...
정지한 잔상이 보이는 시점간의 간격은 점점 더 짧아지며, 팔의 개수는 3개씩 늘어난다.
스피너가 더욱 감속함에 따라 잔상이 멈춰보이는 시점들의 구분은 점점 더 불문명해지며, 결국 스피너는 정지한다.
...??? 대체 왜???
당시의 나는 1. 왜 저런 현상이 나타나는지, 그리고 2. 점점 짧아지는 시간 간격을 어떻게 설명하고, 어떻게 정량적으로 계산할 수 있는지가 너무 궁금했다.
검색을 통해 스트로브 효과, 마차바퀴 효과라는 키워드까지는 도달할 수 있었지만, 그 이상의 무언가는 찾을 수 없었다.
이건 내가 직접 해결해야 하는 문제였다.
<A Fidgety Problem>은 피젯 스피너 잔상의 문제를 해결하기 위해 내가 거친 과정을 기록한 보고서이다.
대치동에서 김동욱 국어 수업을 들으며 스피너 문제를 고민하던 방학이 생각난다..
스피너의 회전 속도를 직접 측정할 방법이 없어서 컴퓨터 시뮬레이션을 만들었다가, 결국 광저항과 스피너의 그림자를 이용해 스피너의 회전 속도를 측정함으로써 문제 해결의 실마리가 열린다.
정말 정말 혹시라도 다른 누군가가 비슷한 문제를 접하여 궁금증을 참지 못하고 있다면 이 글을 발견하여 relief를 얻을 수 있었으면 좋겠다. (나는 궁금한 것이 unresolved이면 견디지 못하는 성격이다.)
이하는 예전에 작성해 둔 "탐구 과정 정리" 문서의 내용이다:
- 피젯 스피너를 빠르게 돌리고 감속하는 동안 지켜보면, 규칙적으로 느려졌다 멈추고 다시 빨라서 사라지는 잔상을 반복적으로 보게 됨. 이때, 잔상에서 ‘팔’의 개수는 다시 나타날 때마다 많아지고, 다시 나타나는 주기는 점점 짧아짐.
- 이 현상에 대한 원인을 찾기 위해 조사해본 결과 ‘마차바퀴 효과’를 알게 됨. 하지만 마차바퀴 효과에서는 고정된 프레임수로 물체를 관찰해야 하는데 반면 이 현상은 맨눈으로 관찰할 때에 나타났고, ‘팔’의 개수가 바뀌지 않아 이 문제에 직접적으로 적용할 수 없음을 깨달음. 또한, 뇌의 시각처리 방식에 대한 연구는 아직 현재진행형으로 확실히 밝혀진 바가 없음을 알게 됨.
- 동생과 동시에 피젯 스피너를 관찰, 동시에 잔상 효과를 봄을 확인함 --> 특정 사람에만 해당하거나 사람별로 다르게 보이는 현상이 아니라 모든 사람에게 동일하게 확인되는 현상임을 추론할 수 있음.
- 이에 직접 이 현상을 설명하고자 가설을 세움: 피젯 스피너는 원래 팔이 3개이다. 사람의 뇌가 영상 정보를 처리할 때 고정된 프레임수로, 즉 일정한 시간 간격으로 인식한다고 가정을 할 때, 스피너의 팔이 다음 팔이 있던 위치까지 한 프레임 동안 이동하면 결과적으로 나타나는 잔상은 팔이 3개인 것처럼 보인다. 반면 한 프레임 동안 두 팔 사이 간격의 절반을 이동하면 팔이 6개로 보인다. 이처럼 한 프레임 동안 스피너의 팔이 두 팔 사이 간격의 n분의 1만큼을 이동하면, 잔상은 피젯 스피너의 팔의 개수의 n배의 팔을 갖게 된다.
- 공기 저항을 무시할 때, 피젯 스피너는 일정한 각가속도로 감속하게 된다. 이를 앞의 가설과 함께 이용하면 잔상이 나타나는 주기를 구할 수 있다. 이후 실험을 통해 잔상이 나타나는 시간을 예측값과 비교해 보았다. 결과는 불일치.
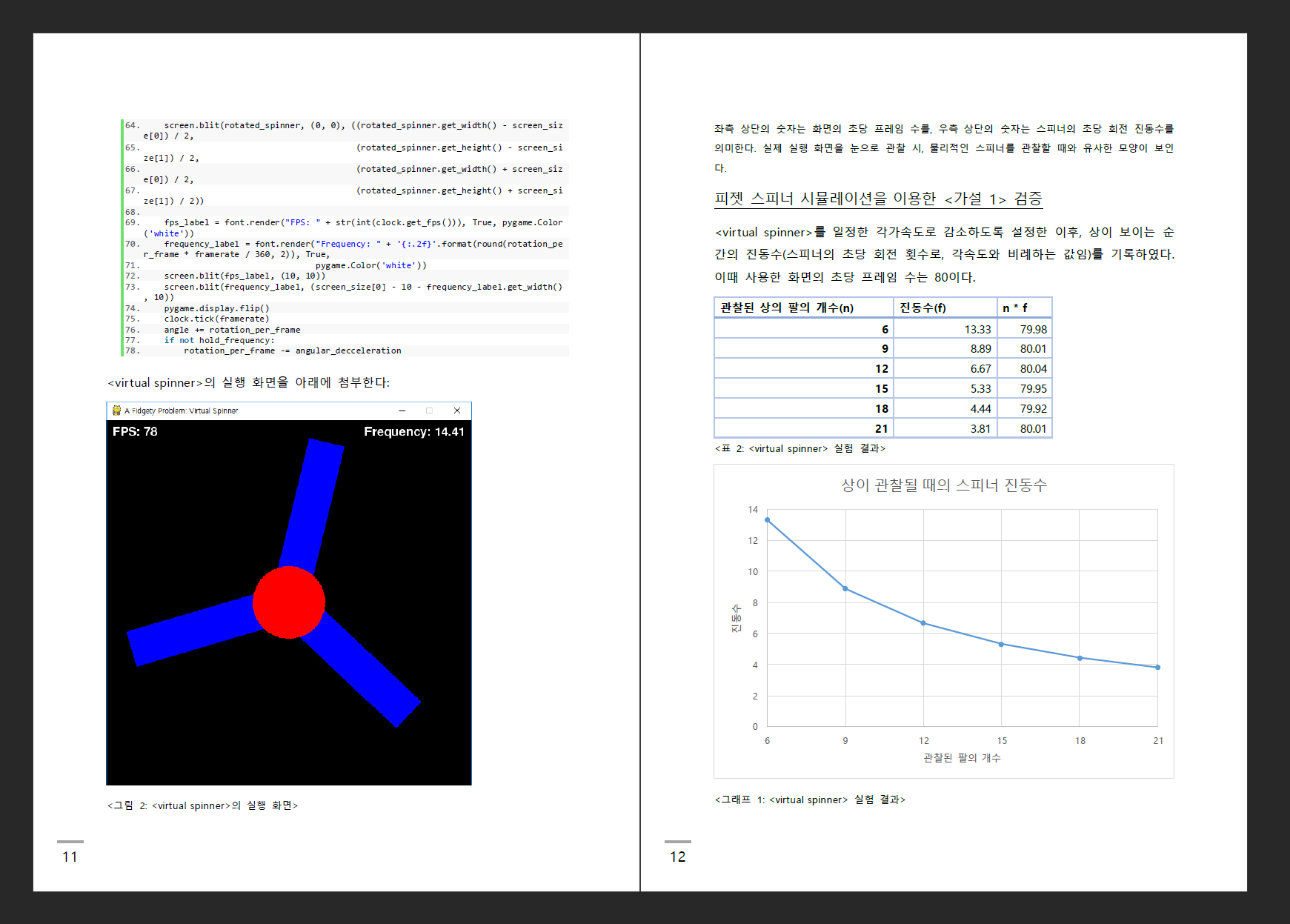
- 피젯 스피너의 잔상 문제를 정확히 풀기 위해서는 스피너의 진동수(회전 각속도)를 알아야 한다. 하지만 이를 측정하기란 힘들다. 따라서 컴퓨터 SW를 이용해 이를 내가 원하는 속도로 회전시킬 수 있다면, 탐구가 쉬워진다. 이에 시뮬레이션을 만들었으나, 각가속도 값을 일정하게 설정했을 시, 이전의 잘못된 예측값과 들어맞는 현상이 화면에 관찰되었다. 따라서 각가속도 값을 실제 스피너와 같이 변경해 주지 않는 이상 컴퓨터 시뮬레이션은 의미가 없다. 또한, 모니터 자체의 프레임수가 60Hz이기 때문에 스피너가 빠르게 돌 때는 움직임이 부드럽지 않았고, 실험 결과가 컴퓨터의 프레임수에 의존적인 결과가 나왔다. 따라서 원하는 결과가 아니라고 할 수 있다.
- 각가속도 값을 더욱 정확하게 설명하기 위해 공기 저항을 고려한 식을 세워보았다. 운동마찰력은 일정하고 공기 저항은 속도에 비례한다고 가정할 시, 미분방정식이 세워진다. 이를 풀면 시간에 대한 각속도 식을 구할 수 있다. 멈출 때까지 걸리는 시간을 이용해 식의 상수들을 구할 수 있어졌다.
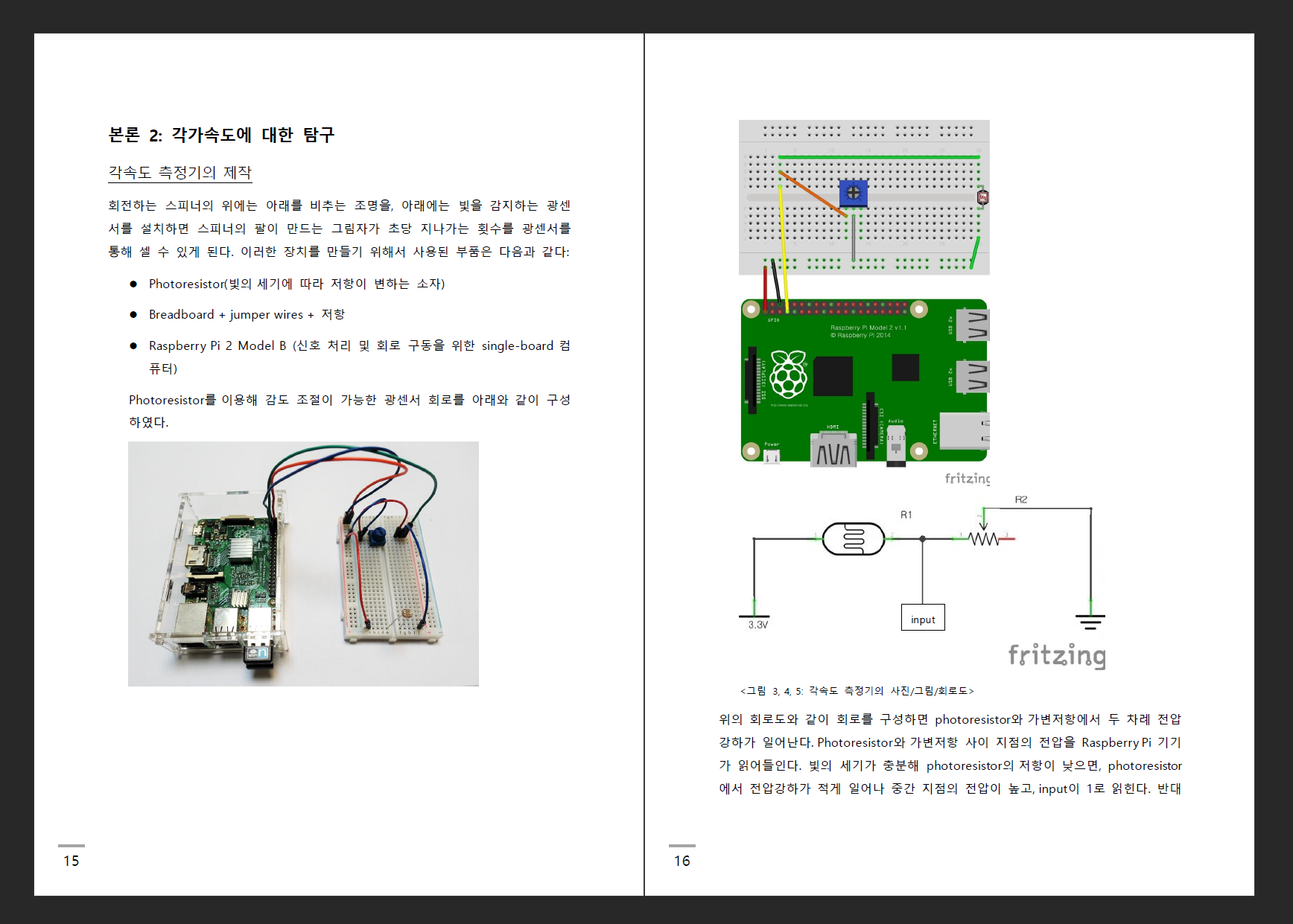
- 실제 스피너의 회전 속도를 측정해 보기로 했다. 이를 위해 광센서를 이용하는 방법을 생각해냈다. 위에서 빛을 비춘 상태에서 광센서와 광원 사이에 스피너를 돌리면, 스피너 팔이 광센서 위를 지나갈 때마다 그림자가 지나간다. 이를 읽어들이면 스피너의 회전 속도를 측정할 수 있다.
- 회로를 성공적으로 설계하여 실험을 진행하였으나, 값이 한가지 추세선이 아닌 세가지 추세선을 각각 따르는 듯한 그래프가 그려졌다. 자전거 램프의 주기적 깜빡임으로 테스트 해 본 결과, 빛이 켜질 때 뿐만 아니라 꺼질 때에도 한 주기로 계산되고 있었다. 광다이오드의 저항값이 바뀌기 위해서는 일정 시간이 필요한데, 이를 코드에 반영하지 않았던 것으로 원인을 추정하고 루프에 일정 시간의 딜레이를 넣었다. 이후 측정에서는 값이 한가지 추세선을 따라 감소하는 모습을 보였다. 단, 이 추세선에도 값들이 짧은 선분 형태로 모여있는 특이점이 발견되었으나 이의 원인을 찾지는 못했다. --> 찾았다. 탐구 보고서에 언급됨.
- 이후 탐구 과정은 탐구 보고서 참고 바람.

초록은 다음과 같다:
초록
본 논문은 ‘피젯 스피너’라 불리는 회전 장난감에서 스트로브 효과를 관찰한 이후, 이를 과학적으로 탐구하기 위해 작성되었다. 스트로브 효과에 대한 조사 이후 피젯 스피너에서의 스트로브 효과에 대한 가설을 세우게 되었고, 이의 검증 과정에서 컴퓨터를 동원한 시뮬레이션과 스피너의 회전 진동수 측정을 위한 장치를 제작해 도입하였다. 결국 피젯 스피너에서의 스트로브 효과는 인간의 시각 처리 방식과는 무관한 실내 조명의 깜빡임 때문이라는 결론에 도달하게 되었으며, 이어 스피너의 회전 속도를 수학적으로 모델링하는 탐구를 진행해 스피너의 각속도를 시간에 대한 함수로 나타낼 수 있게 되었다.
탐구의 결론은 다음과 같다:
결론
지금까지의 탐구를 통해 다음과 같은 결론에 도달할 수 있었다:
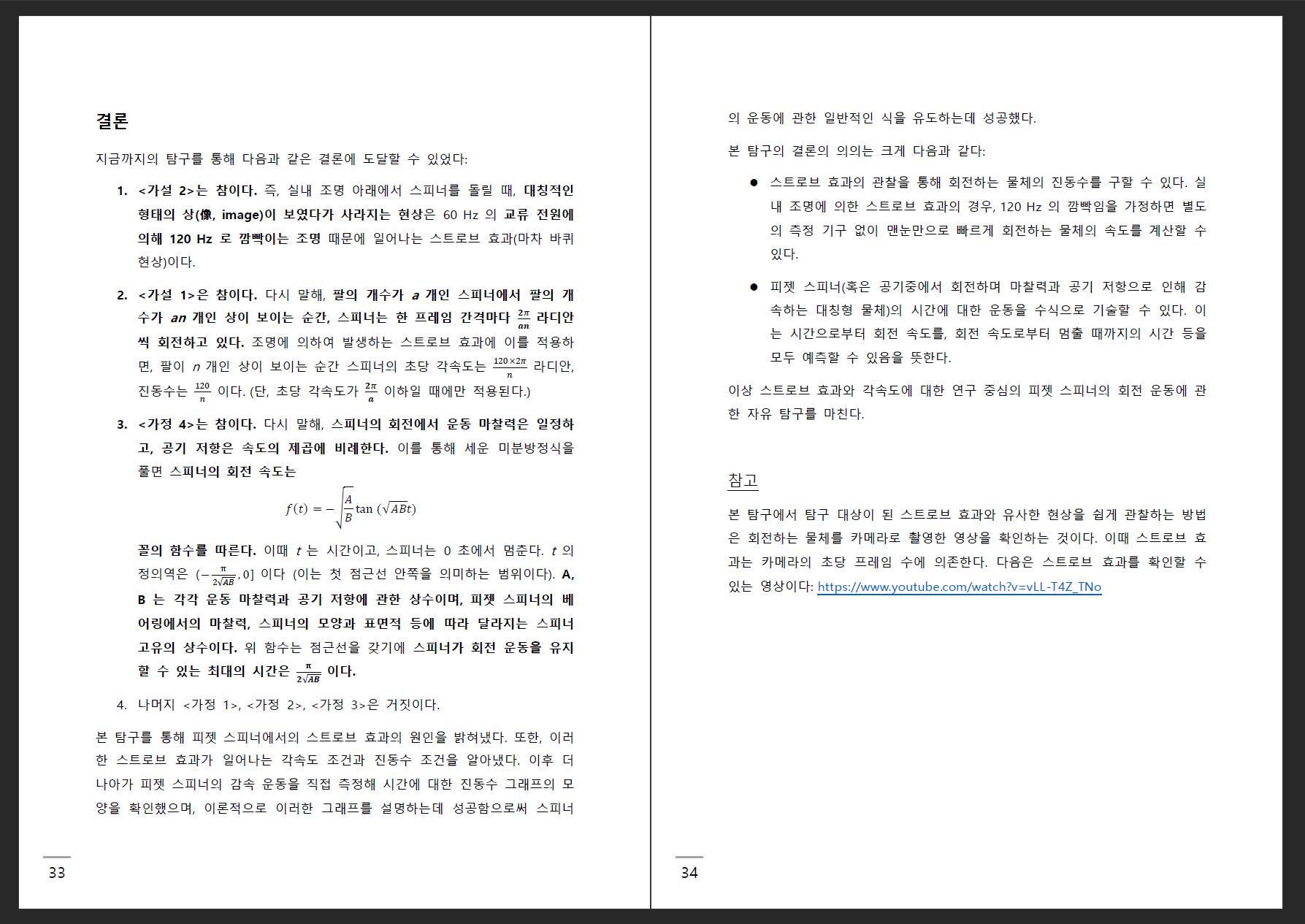
- <가설 2>는 참이다. 즉, 실내 조명 아래에서 스피너를 돌릴 때, 대칭적인 형태의 상(像, image)이 보였다가 사라지는 현상은 60 Hz 의 교류 전원에 의해 120 Hz 로 깜빡이는 조명 때문에 일어나는 스트로브 효과(마차 바퀴 현상)이다.
- <가설 1>은 참이다. 다시 말해, 팔의 개수가 a 개인 스피너에서 팔의 개수가 an 개인 상이 보이는 순간, 스피너는 한 프레임 간격마다 2πan 라디안씩 회전하고 있다. 조명에 의하여 발생하는 스트로브 효과에 이를 적용하면, 팔이 n 개인 상이 보이는 순간 스피너의 초당 각속도는 120×2πn 라디안, 진동수는 120n 이다. (단, 초당 각속도가 2πa 이하일 때에만 적용된다.)
- <가정 4>는 참이다. 다시 말해, 스피너의 회전에서 운동 마찰력은 일정하고, 공기 저항은 속도의 제곱에 비례한다. 이를 통해 세운 미분방정식을 풀면 스피너의 회전 속도는
ft=-ABtan(ABt)
꼴의 함수를 따른다. 이때 t 는 시간이고, 스피너는 0 초에서 멈춘다. t 의 정의역은 (-π2AB, 0 ] 이다 (이는 첫 점근선 안쪽을 의미하는 범위이다). A, B 는 각각 운동 마찰력과 공기 저항에 관한 상수이며, 피젯 스피너의 베어링에서의 마찰력, 스피너의 모양과 표면적 등에 따라 달라지는 스피너 고유의 상수이다. 위 함수는 점근선을 갖기에 스피너가 회전 운동을 유지할 수 있는 최대의 시간은 π2AB 이다.- 나머지 <가정 1>, <가정 2>, <가정 3>은 거짓이다.
본 탐구를 통해 피젯 스피너에서의 스트로브 효과의 원인을 밝혀냈다. 또한, 이러한 스트로브 효과가 일어나는 각속도 조건과 진동수 조건을 알아냈다. 이후 더 나아가 피젯 스피너의 감속 운동을 직접 측정해 시간에 대한 진동수 그래프의 모양을 확인했으며, 이론적으로 이러한 그래프를 설명하는데 성공함으로써 스피너의 운동에 관한 일반적인 식을 유도하는데 성공했다.
본 탐구의 결론의 의의는 크게 다음과 같다:
- 스트로브 효과의 관찰을 통해 회전하는 물체의 진동수를 구할 수 있다. 실내 조명에 의한 스트로브 효과의 경우, 120 Hz 의 깜빡임을 가정하면 별도의 측정 기구 없이 맨눈만으로 빠르게 회전하는 물체의 속도를 계산할 수 있다.
- 피젯 스피너(혹은 공기중에서 회전하며 마찰력과 공기 저항으로 인해 감속하는 대칭형 물체)의 시간에 대한 운동을 수식으로 기술할 수 있다. 이는 시간으로부터 회전 속도를, 회전 속도로부터 멈출 때까지의 시간 등을 모두 예측할 수 있음을 뜻한다.
이상 스트로브 효과와 각속도에 대한 연구 중심의 피젯 스피너의 회전 운동에 관한 자유 탐구를 마친다.
해결 못했으면 (궁금해서) 큰일날 뻔 했지만,
결국 이런저런 코딩/수학/회로 지식을 통해 목표를 이뤄낸 좋은 경험이 된 것 같다.
탐구 과정이 포함된 전체 보고서를 첨부한다:
'Public Notebook > 작품 전시관' 카테고리의 다른 글
| 2016 - Silent Storm (고1) (2) | 2023.01.07 |
|---|---|
| 2015 - Adventureland (중3) (0) | 2023.01.07 |